RSSR-SSR Spatial Parallel Robot
Mathematics involved
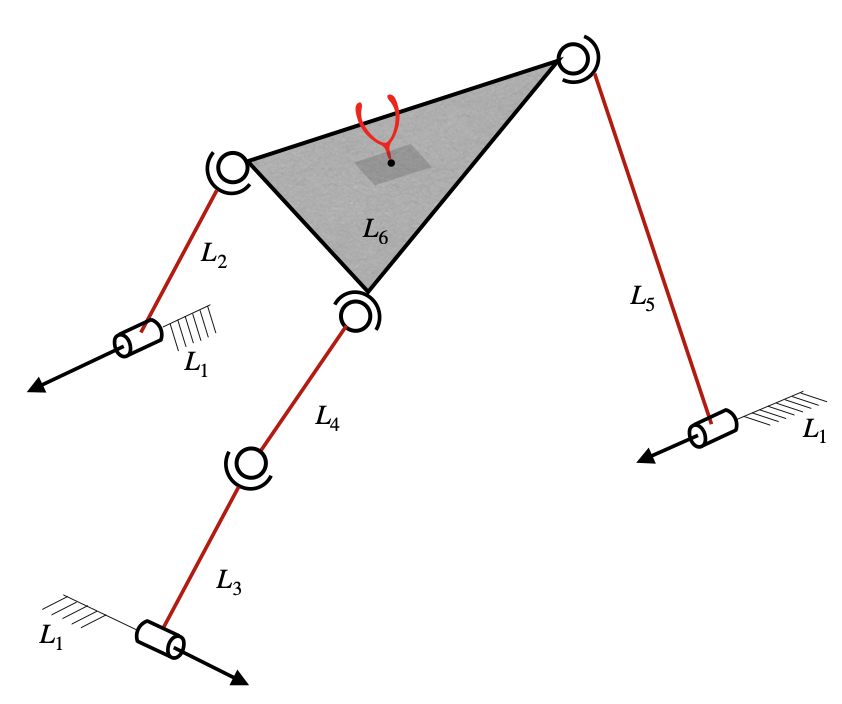
The RSSR-SSR Serial-Parallel Hybrid Robot is taken from [1], and a picture of the robot is shown in the above figure. The corresponding adjacency matrix is given by
Connecting paths:
All possible paths connecting the end-effector link from the base link, are shown below.
In order to check for possibility of redundant paths, the rank of the connectivity matrix is considered.
The rank of the matrix \([\bf{C}_{\bf{V}}]\) is 3. This shows that all the three connecting paths from base to end-effector are independent. Hence, all the three linear velocity equations are considered for Jacobian formulation.
Now, the angular velocity connectivity matrix is considered as follows.
Since there are no prismatic joints, the equations are taken as they are, without any reduction. And the matrix \([\bf{C_{\Omega}}]\) is formulated as follows.
The rank of the matrix \([\bf{C_{\Omega}}]\) is 3. This shows that all the three connecting paths from base to end-effector are independent. Hence, all the three angular velocity equations are considered for Jacobian formulation.
Therefore, the independent linear velocities are \(\bf{v}^{(1)}\), \(\bf{v}^{(2)}\) and \(\bf{v}^{(3)}\), and the independent angular velocities are \(\bf{\omega}^{(1)}\), \(\bf{\omega}^{(2)}\) and \(\bf{\omega}^{(3)}\).
Constraint equations:
The system of equations shown above would be insufficient to represent the passive joint velocities in terms of active joint velocities. This is due to the fact that the fourth link has rotation along its longitudinal axis not controllable with the actuators yet does not affect the end-effector’s velocity. Performing pseudo-inverse can fix this issue but pseudo-inverse could be a discontinuous operation near singular values. Instead, an additional equation for each such superfluous DOF is calculated as per the method shown in algorithm 3 of the main document.
Since the manipulator has more than two spherical joints, the list of all possible combinations C of dividing the manipulator into two parts is considered. Since there are six links and since 6 is an odd number, \({}^{6}C_{1}+{}^{6}C_{2}+{}^{6}C_{3}=41\) distinct combinations exist, out of which the combination \([\{4\}, \{1,2,3,5,6\}]\) is discussed in detail in this sub-section. This combination has \(c_1 = \{4\}\) and \(c_2 = \{1,2,3,5,6\}\). And by grouping the links of each part together, the topology-matrix can be rewritten as shown in the equation below.
From the above, the coupling matrix can be extracted to be as shown below.
It can be seen that the coupling matrix has only two spherical joints and no other joint. This shows that the two parts \(c_1\) and \(c_2\) are connected by two spherical joints alone and no other joint. And it can also be seen that both the base link (first link) and the end-effector link (last link), i.e., both the links \(1\) and \(6\), lie in one part of the combination, i.e., in \(c_2\). Hence, \(c_{be}=c_2\). The corresponding link numbers for each of the two spherical joints are \(3,4\) and \(4,6\). Since \(3,6\in c_{be}\), the sequences \((i,j)\) and \((k,l)\) are considered to be \((3,4)\) and \((4,6)\), respectively. Since \(j\) and \(k\) are the same link (link 4), the superfluous link \(s\) would be link \(4\). Only one of the connecting paths \(P\) happens to contain the link \(4\) for this particular case, and that is \((1,3,4,6)\). If the path is truncated at the superfluous link, it would become \((1,3,4)\). Hence, absolute angular velocity of link 4, formulated through this truncated path, is given by the equation shown below.
Therefore, the additional equation corresponding to this superfluous DOF can be formulated as shown in equation below.
This needs to be added to the earlier system of equations, in order to make \(\bf{A_p}\) a square matrix, with which the passive joint velocities can be written in terms of active joint velocities.
References
[1] Muralidharan V, Bandyopadhyay S (2019) “A two-degree-of-freedom rssr-ssr manipulator for sun-tracking.” In: Badodkar DN, Dwarakanath TA (eds) Machines, Mechanism and Robotics. Springer Singapore, Singapore, pp 135–147